Protocolos de Comunicação
(Texto introdutorio)
Tabela de Comunicações

CAN
CAN, Controller Area Network, é uma especificação de interconexão e protocolo para comunicação que está sendo utilizada em larga escala pela indústria automobilística. Devido a queda no custos dos circuitos eletrônicos e aprimoramento nos conhecimentos das aplicações CAN, tivemos um crescimento significativo de 20 milhões de nós CAN em uso mundial, no ano de 1997, para cerca de 120 milhões no ano 2000. O protocolo CAN é, certamente, o principal protocolo de barramento em veículos na Europa.
Uma rede CAN pode interligar até 2032 dispositivos, sendo que o limite prático é de aproximadamente 110 dispositivos, onde cada dispositivo é tratado como um nó da rede. No nível físico, o link serial mais usado é composto de dois fios, o sinal tem característica diferencial, é capaz de operar até 1 Mbps, tendo restrições de velocidade em virtude da distância entre os nós. Para uma rede com extensão de 1 km, a velocidade por ser reduzida até 50Kbps. Cada nó ligado a este link serial é capaz de “ouvir”, simultaneamente a outros nós, os dados transmitidos na rede. A escrita, porém, é uma operação permitida somente para um dispositivo por vez.
O acesso ao barramento é manipulado através do avançado protocolo de comunicação serial Carrier Sense Multiple Access / Collision Detection (CSMA/CD). Isto significa que a colisão de mensagens é evitada através de arbitragem bit a bit, sem perda de tempo. Há dois estados do barramento: “dominante” e “recessivo”. A lógica do barramento usa o mecanismo “Wired-AND”, que quer dizer, os “bits dominantes” (equivalente ao nível lógico “Zero”) sobrepõem os “bits recessivos” (equivalente ao nível lógico “Um”).
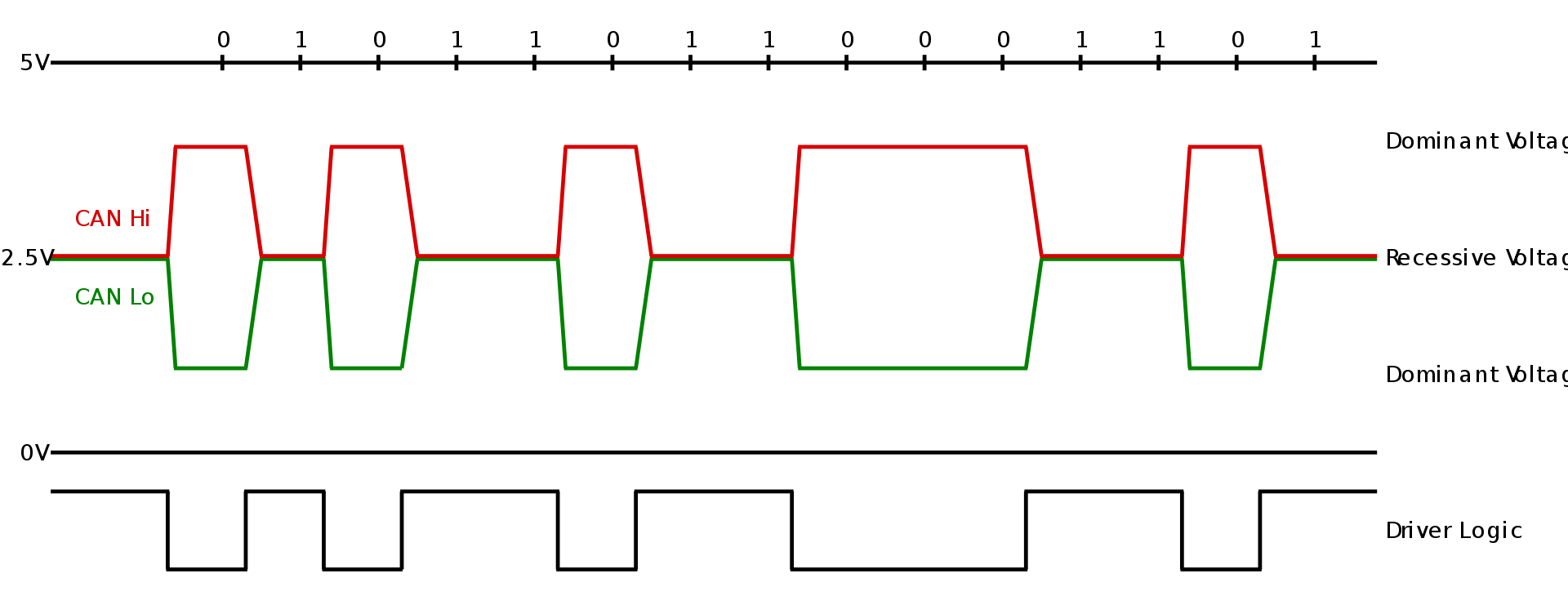
As linhas do barramento são chamadas “CAN_H” e “CAN_L”. As duas linhas do barramento CAN_H e CAN_L são controladas pelos nós com um sinal diferencial. O par de fios trançado é terminado com um resistor tipicamente de 120 Ohms em cada ponta da linha. Devido à transmissão operar de forma diferencial, o CAN é resistente à interferência eletromagnética, porque ambas as linhas do barramento são afetadas da mesma maneira, o que deixa o sinal diferencial inalterado. Para reduzir ainda mais a sensibilidade contra a interferência eletromagnética, as linhas podem ser protegidas adicionalmente por uma malha blindada. Isto também reduz a irradiação eletromagnética do próprio barramento, especialmente em altas taxas de transmissão.
As especificações originais do CAN (Versões 1.0, 1.2 e 2.0A) especificam um identificador de mensagem de 11 bits. Isto é conhecido como “CAN Padrão”. Os Quadros de Dados e Quadros Remotos que contêm um identificador de 11 bits são por este motivo chamados de Quadros Padrões. Com estes quadros, 2048 mensagens diferentes podem ser identificadas. A especificação V2.0A foi atualizada (versão 2.0B ) para remover esta possível limitação de número de mensagem e, com isto, atender ao padrão SAE J1939 para o uso do CAN em caminhões. A versão 2.0B do CAN é chamada “CAN Estendido”.
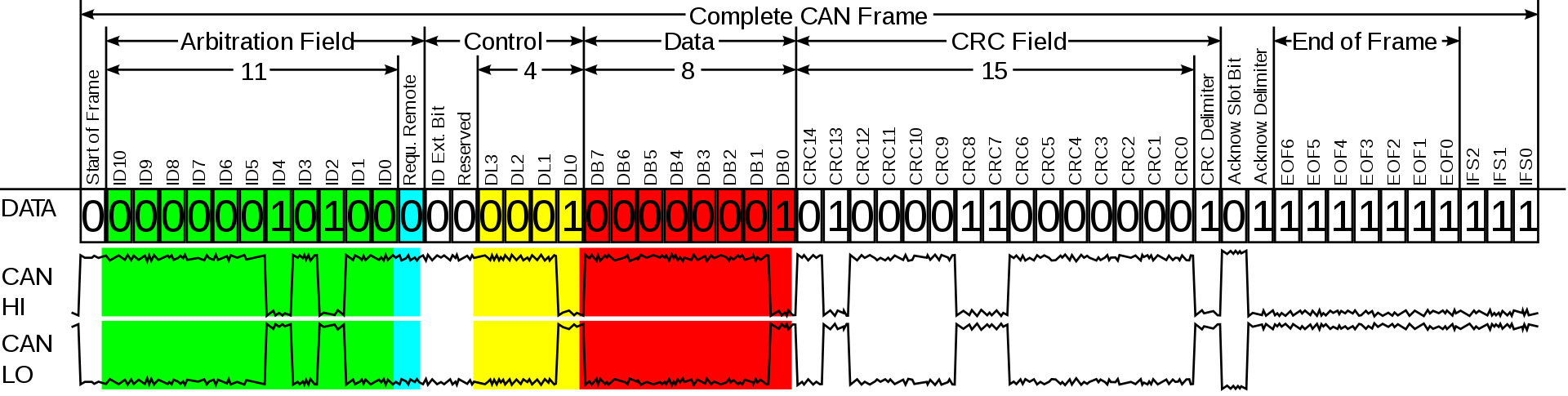
O quadro começa com um bit dominante de “Início de Quadro” (Start of Frame) para sincronização de todos os nós receptores. O bit “Início de Quadro” é seguido pelo Campo de Arbitragem (Arbitration Field) que consiste em 12 bits: os 11 bits do identificador que refletem o conteúdo e prioridade da mensagem mais o bit de “Pedido de Transmissão Remota” (Remote Transmission Request, ou RTR) usado para distinguir um Quadro de Dados (RTR = dominante) de um Quadro Remoto (RTR = recessivo).
O segundo campo é o Campo de Controle (Control Field) e consiste em 6 bits. O primeiro bit deste campo é chamado de bit IDE (Identificador de Extensão) e está em estado dominante para especificar que o quadro é um quadro padrão. O bit seguinte é reservado e definido como um bit dominante. Os 4 bits restantes do Campo de Controle são o Código de Tamanho de Dados (Data Length Code, ou DLC) e especifica o número de bytes de dados contido na mensagem (0 - 8 bytes).
O dados enviados seguem no Campo de Dados (Data Field) cujo tamanho é definido pelo DLC acima (0, 8, 16,…., 56 ou 64 bits).
Em seguida vem o Campo de Redundância Cíclica (Cyclic Redundancy Field, ou CRC Field), usado para descobrir possíveis erros de transmissão. O Campo CRC consiste em uma sucessão de 15 bits CRC, completada por um bit delimitador recessivo.
O terceiro campo é o Campo de Reconhecimento (Acknowledge Field). Durante esta janela o nó que está transmitindo a mensagem envia um bit recessivo. Qualquer nó que tenha recebido um quadro sem erro reconhece a correta recepção do quadro mandando de volta um bit dominante (independente do nó estar configurado para aceitar aquela mensagem específica ou não). Com isto, pode-se concluir que o CAN pertence ao grupo de protocolos “in-bit-response”. Em seguida vem o bit delimitador que é recessivo e não pode ser reescrito por um bit dominante. Sete bits recessivos (Fim de Quadro) finalizam o Quadro de Dados. Entre dois quadros o barramento deve permanecer no mínimo três bits recessivos. Se nenhum nó quiser mais transmitir, o barramento permanece no estado de repouso (Bus Idle).
I²C
Descrição
O modo de funcionamento do protocolo I2C é baseado na interação entre elementos seguindo a hierarquia mestre/escravo, ou seja, quando temos vários dispositivos se comunicando segundo esta premissa, pelo menos um destes deve atuar como mestre e os demais serão escravos. A função do mestre consiste em realizar a coordenação de toda a comunicação, ou seja, colocar em prioridade qual informação deve ser enviada primeiro de acordo com os requisitos. Está é a forma da estrutura:
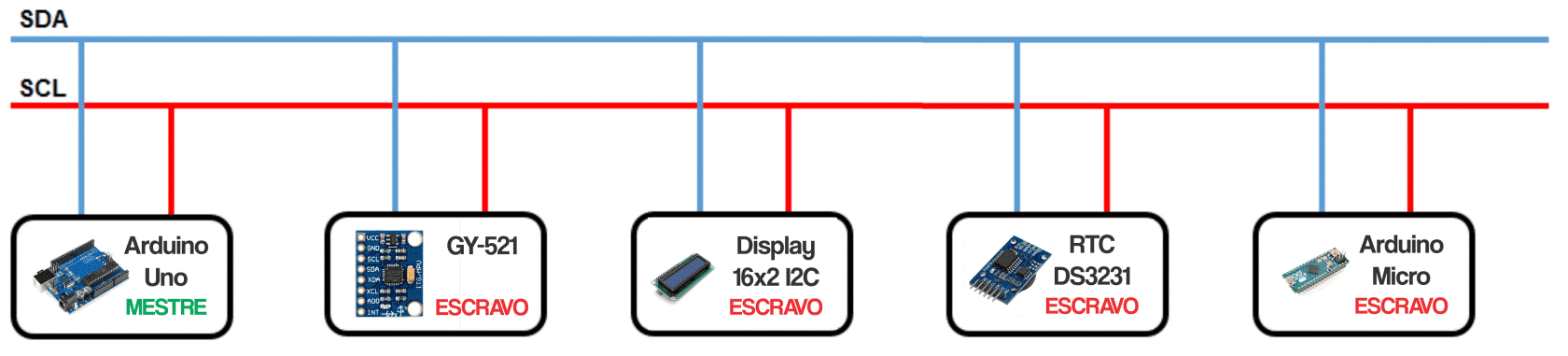
O barramento de comunicação I2C pode ser dividido em duas formas: ->SDA (Serial Data), o qual, é responsável pela troca de dados entre os dispositivos do arranjo ->SCL (Serial Clock), possui a função de sincronizar os dispositivos e garantir a confiabilidade do sistema. Para distinguir cada sensor e ou modulo é necessário saber o endereço de barramento no qual deve ser único para cada, por isso é necessário utilizar um programa de busca para saber está informação e se for necessário alterá-lo.
Analógica
Descrição
A comunicação é utilizada quando uma grandeza pode assumir infinitos valores de acordo com o tempo, como temperatura, pressão e umidade. Entretanto os controladores leem apenas valores digitais, por isso é necessário converter de acordo com sensor e ou modulo uma forma de transformação. Um conversor A/D quantifica o valor analógico conforme a quantidade de bits da sua resolução. A resolução de um conversor A/D é dada pela seguinte equação:
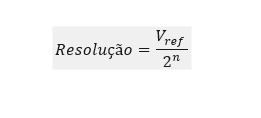
Vref: Tensão de referência do conversor A/D N: número de Bits do conversor.
Digital
Descrição
A comunicação digital é aquela que as respostas da 0 ou 1, ou seja, trabalha com valores verdadeiros e falsos. Por padrão os pinos digitais dos controladores estão configurados como entradas digitais, porém, para ficar mais explícito na programação, deve-se configurar o pino como entrada. Dessa forma o pino é colocado em um estado de alta impedância, equivalente a um resistor de 100 MegaOhms em serie com o circuito a ser monitorado. Dessa forma, o pino absorve uma corrente muito baixa do circuito que está monitorando. Devido a essa característica de alta impedância, quando um pino colocado com entrada digital encontrasse flutuando (sem ligação definida), o nível de tensão presente nesse pino fica variando não podendo ser determinado um valor estável devido a ruido elétrico e até mesmo capacitância de entrada do pino. Para resolver esse problema é necessário colocar um resistor de pull up (ligado a +5V) ou um resistor de pull down (ligado a GND) conforme a necessidade. Esses resistores garantem nível lógico estável quando por exemplo uma tecla não está pressionada. Geralmente utiliza-se um resistor de 10K para esse propósito.
OneWire
Descrição
1-Wire é um tipo de comunicação, um sistema de barramento projetado pela Dallas Semiconductor Corpo. que provê dados de baixa velocidade, sinalização e sinal único de energia.[1] 1-Wire tem um conceito similar ao do I²C, mas com taxas mais baixas de dados e maior alcance. O 1-Wire é basicamente um acessório pequeno e utilizado em funções digitais e também em instrumentos de medição de temperatura (termômetro). Uma rede de dispositivos 1-Wire associados com um Mestre, é chamada de MicroLan.
Um diferencial do barramento 1-Wire é o fato de utilizar apenas dois cabos: dados e GND. Para isso, o dispositivo 1-Wire dispõe de um capacitor de 800 pF para armazenar carga e alimentar o dispositivo durante os períodos onde o cabo de dados estiver sendo usado para o tráfego de dados.
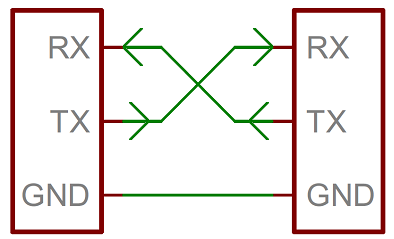
Uart
Descrição
É um protocolo utilizado por muitos microcontroladores, pois é responsável pela conversão da comunicação paralela em serial, que na maioria das vezes é convertida em outro protocolo como por exemplo o controlador da placa BlackBoard ou Arduino Uno, que utiliza o protocolo UART mas tem o protocolo convertido para USB. Funcionamento: o pino de transmissão (Tx) do protocolo envia um pacote de bits que será interpretado bit a bit pelo pino receptor. Cada pacote enviado contém 1 start bit que indica o início da mensagem, 1 ou 2 stop bits para indicar o final da mensagem, 5 a 9 bits de informação e 1 bit de paridade para evitar a recepção de erros. Ligação: por ser uma comunicação assíncrona a comunicação é feita por dois pinos Rx/Tx que dependem do baud rate como referência.
SPI
Descrição
A comunicação SPI possui algumas características básicas. Primeiramente os sinais de comunicação possuem uma direção fixa e definida. Isso significa que sempre existem dois transistores definindo o estado de um pino (Push-Pull). Essa característica é uma das grandes diferenças entre outras comunicações seriais como I2C e OneWire, que possuem um mesmo barramento de dados para os sinais de entrada e saída através do esquema de dreno-aberto (Pull-Up). Apesar de utilizar dois sinais de comunicação de dados em vez de um, é possível atingir velocidades maiores de comunicação. Isso porque há pouca deformação do sinal. Outra característica é que toda troca de dados acontece sempre em ambas as direções. Em outras palavras, cada bit trocado entre o Master e um Slave traz um bit do Slave para o Master. Dessa forma, definimos que a comunicação é sempre full-duplex
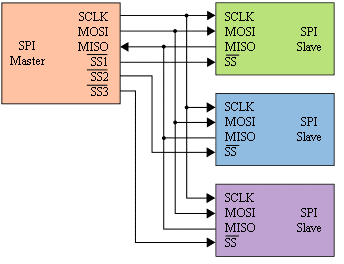
O sinal de SS da SPI funciona como Seleção de Escravo (Slave Select). É um sinal ativo em nível baixo, o que significa que o dispositivo é selecionado quando este pino se encontra em nível baixo. No entanto, muitos dispositivos utilizam este sinal como sincronismo de frame. Dessa forma, é um sinal importante que deve ser respeitado.